
Trosglwyddo â llaw - blwch gêr robotig
Cynnwys
Ni fydd unrhyw gar modern yn gallu cychwyn a symud yn esmwyth os nad oes trosglwyddiad yn ei ddyfais. Heddiw, mae yna amrywiaeth eang o flychau gêr o bob math, sydd nid yn unig yn caniatáu i'r gyrrwr ddewis yr opsiwn sy'n gweddu i'w alluoedd ariannol, ond sydd hefyd yn ei gwneud hi'n bosibl cael y cysur mwyaf wrth yrru.
Disgrifir yn fyr am y prif fathau o drosglwyddo yn adolygiad ar wahân... Nawr, gadewch i ni siarad yn fwy manwl am beth yw blwch gêr robotig, ei brif wahaniaethau o flwch gêr â llaw, a hefyd ystyried egwyddor gweithrediad yr uned hon.
Beth yw blwch gêr robotig
Mae gweithrediad y blwch gêr bron yn union yr un fath â'r analog mecanyddol ac eithrio rhai nodweddion. Mae dyfais y robot yn cynnwys llawer o rannau sy'n ffurfio fersiwn fecanyddol y blwch sydd eisoes yn gyfarwydd i bawb. Y prif wahaniaeth rhwng yr un robotig yw bod ei reolaeth o fath microbrosesydd. Mewn blychau gêr o'r fath, mae symud gêr yn cael ei berfformio gan electroneg yn seiliedig ar ddata o synwyryddion yr injan, pedal nwy ac olwynion.

Gellir galw blwch robotig hefyd yn beiriant awtomatig, ond mae hwn yn enw anghywir. Y gwir yw bod trosglwyddo awtomatig yn aml yn cael ei ddefnyddio fel cysyniad cyffredinoli. Felly, mae gan yr un newidydd fodd awtomatig ar gyfer newid cymarebau gêr, felly i rai mae hefyd yn awtomatig. Mewn gwirionedd, o ran strwythur ac egwyddor gweithredu, mae'r robot yn agosach at flwch mecanyddol.
Yn allanol, mae'n amhosibl gwahaniaethu trosglwyddiad â llaw oddi wrth drosglwyddiad awtomatig, oherwydd gall fod ganddynt ddewisydd a chorff union yr un fath. Dim ond tra bo'r cerbyd yn gyrru y gallwch chi wirio'r trosglwyddiad. Mae gan bob math o uned ei nodweddion gwaith ei hun.
Prif bwrpas trosglwyddiad robotig yw gwneud gyrru mor hawdd â phosibl. Nid oes angen i'r gyrrwr newid gerau ar ei ben ei hun - mae'r uned reoli yn gwneud y gwaith hwn. Yn ogystal â chysur, mae gweithgynhyrchwyr trosglwyddo awtomatig yn ymdrechu i wneud eu cynhyrchion yn rhatach. Heddiw, y robot yw'r math mwyaf cyllidebol o flwch gêr ar ôl mecaneg, ond nid yw'n darparu cysur gyrru o'r fath fel newidydd neu awtomatig.
Egwyddor blwch gêr robotig
Gall y trosglwyddiad robotig newid i'r cyflymder nesaf naill ai'n awtomatig neu'n lled-awtomatig. Yn yr achos cyntaf, mae'r uned microbrosesydd yn derbyn signalau gan y synwyryddion, y mae'r algorithm sydd wedi'i raglennu gan y gwneuthurwr yn cael ei sbarduno ar ei sail.
Mae dewisydd â llaw ar y mwyafrif o flychau gêr. Yn yr achos hwn, bydd y cyflymderau'n dal i droi ymlaen yn awtomatig. Yr unig beth yw y gall y gyrrwr signal yn annibynnol yr eiliad o droi gêr i fyny neu i lawr. Mae gan rai trosglwyddiadau awtomatig o'r math Tiptronig egwyddor debyg.
Er mwyn cynyddu neu leihau cyflymder, mae'r gyrrwr yn symud lifer y dewisydd tuag at + neu tuag at -. Diolch i'r opsiwn hwn, mae rhai pobl yn galw'r trosglwyddiad hwn yn ddilyniannol neu'n ddilyniannol.
Mae'r blwch robotig yn gweithio yn unol â'r cynllun canlynol:
- Mae'r gyrrwr yn cymhwyso'r brêc, yn cychwyn yr injan ac yn symud y switsh modd gyrru i safle D;
- Mae'r signal o'r uned yn mynd i'r uned rheoli blwch;
- Yn dibynnu ar y modd a ddewiswyd, mae'r uned reoli yn actifadu'r algorithm priodol y bydd yr uned yn gweithredu yn unol â hi;
- Yn y broses symud, mae'r synwyryddion yn anfon signalau i "ymennydd y robot" am gyflymder y cerbyd, ynghylch llwyth yr uned bŵer, yn ogystal ag am y modd blwch gêr cyfredol;
- Cyn gynted ag y bydd y dangosyddion yn peidio â chyfateb i'r rhaglen a osodwyd o'r ffatri, mae'r uned reoli yn cyhoeddi gorchymyn i newid i gêr arall. Gall hyn fod naill ai'n gynnydd neu'n ostyngiad mewn cyflymder.
Pan fydd gyrrwr yn gyrru car gyda mecaneg, rhaid iddo deimlo ei gerbyd er mwyn pennu'r foment pryd i newid i gyflymder arall. Mewn analog robotig, mae proses debyg yn digwydd, dim ond y gyrrwr nad oes angen iddo feddwl pryd i symud y lifer sifft i'r safle a ddymunir. Yn lle, mae'r microbrosesydd yn ei wneud.
Mae'r system yn monitro'r holl wybodaeth o'r holl synwyryddion ac yn dewis y gêr gorau posibl ar gyfer llwyth penodol. Er mwyn i'r electroneg newid gerau, mae gan y trosglwyddiad actuator hydromecanyddol. Mewn fersiwn fwy cyffredin, yn lle hydromecaneg, mae gyriant trydan neu yriant servo wedi'i osod, sy'n cysylltu / datgysylltu'r cydiwr yn y blwch (gyda llaw, mae hyn yn debyg iawn i beiriant awtomatig - nid yw'r cydiwr wedi'i leoli yn y fan honno yn y trosglwyddiad â llaw, sef ger yr olwyn flaen, ond yn y trosglwyddiad tai ei hun).
Pan fydd yr uned reoli yn rhoi signal ei bod hi'n bryd newid i gyflymder arall, mae'r gyriant servo trydan (neu hydromecanyddol) cyntaf yn cael ei actifadu gyntaf. Mae'n ymddieithrio arwynebau ffrithiant y cydiwr. Yna mae'r ail servo yn symud y gerau yn y mecanwaith i'r safle a ddymunir. Yna mae'r un cyntaf yn rhyddhau'r cydiwr yn araf. Mae'r dyluniad hwn yn caniatáu i'r mecanwaith weithio heb gyfranogiad y gyrrwr, felly, nid oes gan beiriant â throsglwyddiad robotig bedal cydiwr.

Mae gan lawer o flychau dethol leoliadau gêr gorfodol. Mae'r tiptronig bondigrybwyll hwn yn caniatáu i'r gyrrwr reoli'r foment o newid i gyflymder uwch neu is yn annibynnol.
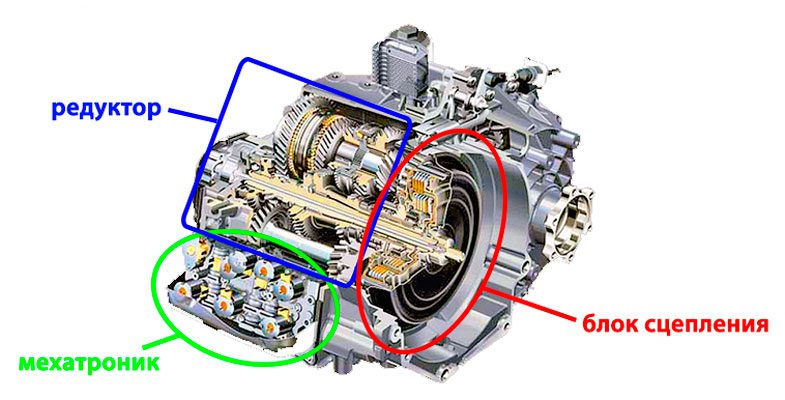
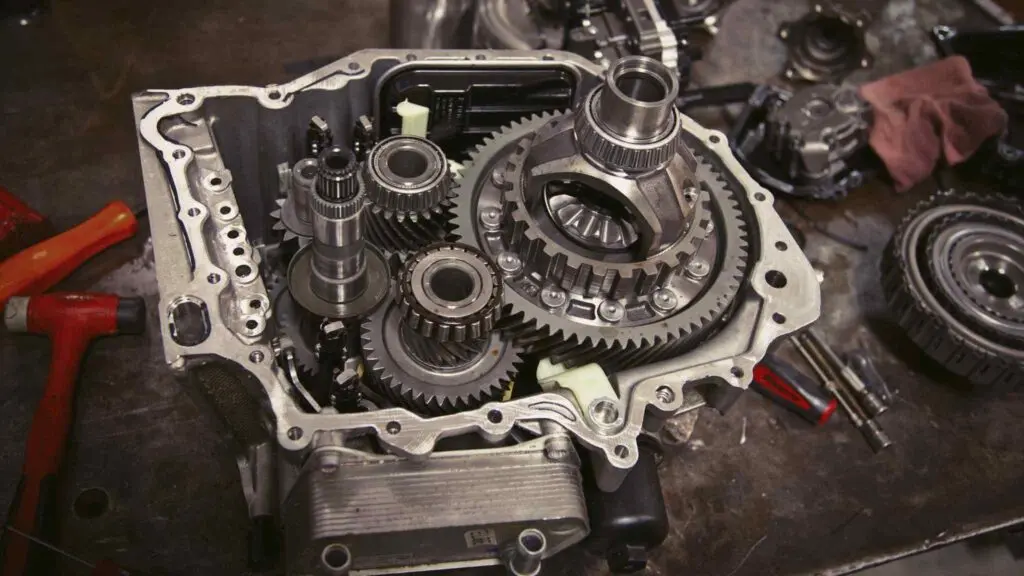
Dyfais blwch gêr robotig
Heddiw, mae yna sawl math o drosglwyddiadau robotig ar gyfer ceir teithwyr. Gallant fod yn wahanol i'w gilydd mewn rhai actiwadyddion, ond mae'r prif rannau'n aros yr un fath yn union.
Dyma'r nodau sydd wedi'u cynnwys yn y blwch gêr:
- Clutch. Yn dibynnu ar y gwneuthurwr ac addasiad yr uned, gall hyn fod yn un rhan ag arwyneb ffrithiant neu sawl disg tebyg. Yn fwyaf aml, mae'r elfennau hyn wedi'u lleoli yn yr oerydd, sy'n sefydlogi gweithrediad yr uned, gan ei atal rhag gorboethi. Mae'r opsiwn dewisol neu ddwbl yn cael ei ystyried yn fwy effeithiol. Yn yr addasiad hwn, tra bod un gêr yn cael ei defnyddio, mae'r ail set yn paratoi i droi ymlaen y cyflymder nesaf.
- Y prif ran yw blwch mecanyddol confensiynol. Mae pob gwneuthurwr yn defnyddio gwahanol ddyluniadau perchnogol. Er enghraifft, mae robot o frand Mercedes (Speedshift) yn drosglwyddiad awtomatig 7G-Tronic yn fewnol. Yr unig wahaniaeth rhwng yr unedau yw, yn lle trawsnewidydd torque, defnyddir cydiwr gyda sawl disg ffrithiant. Mae gan BMW ddull tebyg. Mae ei flwch gêr SMG yn seiliedig ar flwch gêr â llaw â chwe chyflymder.
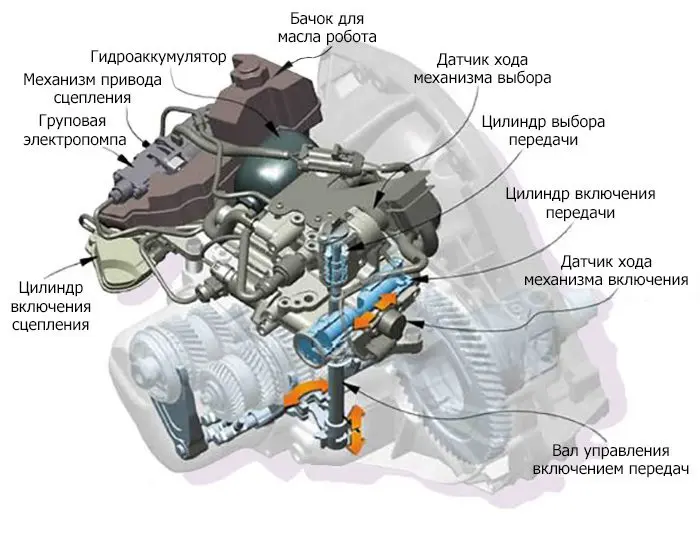
- Clutch a gyriant gêr. Mae dau opsiwn - gyda gyriant trydan neu analog hydromecanyddol. Yn yr achos cyntaf, mae'r cydiwr yn cael ei wasgu allan gan fodur trydan, ac yn yr ail - gan silindrau hydrolig gyda falfiau EM. Mae'r gyriant trydan yn gweithio'n arafach na'r hydroleg, ond nid oes angen cynnal pwysau cyson yn y llinell, y mae'r math electro-hydrolig yn gweithredu ohoni. Mae robot hydrolig, ar y llaw arall, yn symud i'r cam nesaf yn gynt o lawer (0,05 eiliad yn erbyn 0,5 eiliad ar gyfer analog trydan). Mae blwch gêr trydan wedi'i osod yn bennaf ar geir cyllideb, ac mae blwch gêr hydromecanyddol wedi'i osod ar geir chwaraeon premiwm, gan fod cyflymder gearshift yn hynod bwysig ynddynt heb darfu ar y cyflenwad pŵer i'r siafft yrru.

- Synhwyrydd. Mae yna lawer o rannau o'r fath yn y robot. Maent yn monitro llawer o wahanol baramedrau'r trosglwyddiad, er enghraifft, lleoliad y ffyrc, chwyldroadau'r siafftiau mewnbwn ac allbwn, ym mha safle mae'r switsh dewisydd wedi'i gloi, tymheredd yr oerydd, ac ati. Mae'r holl wybodaeth hon yn cael ei bwydo i'r ddyfais rheoli mecanwaith.
- Uned microbrosesydd yw ECU, lle mae gwahanol algorithmau wedi'u rhaglennu gyda gwahanol ddangosyddion yn dod o synwyryddion. Mae'r uned hon wedi'i chysylltu â'r brif uned reoli (oddi yno daw data ar weithrediad injan), yn ogystal â systemau cloi olwynion electronig (ABS neu ESP).
- Actuators - silindrau hydrolig neu moduron trydan, yn dibynnu ar addasiad y blwch.
Manylion gwaith y RKPP
Er mwyn i'r cerbyd gychwyn yn llyfn, rhaid i'r gyrrwr ddefnyddio'r pedal cydiwr yn gywir. Ar ôl iddo gynnwys y gêr gyntaf neu'r gêr gwrthdroi, mae angen iddo ryddhau'r pedal yn llyfn. Unwaith y bydd gan y gyrrwr deimlad o ymgysylltiad y disgiau, wrth iddo ryddhau'r pedal, gall ychwanegu RPM i'r injan i gadw'r car rhag stopio. Dyma sut mae mecaneg yn gweithio.
Mae proses union yr un fath yn digwydd yn y cymar robotig. Dim ond yn yr achos hwn nad oes angen sgil wych gan y gyrrwr. Nid oes ond angen iddo symud y switsh blwch i'r safle priodol. Bydd y cerbyd yn dechrau symud yn unol â gosodiadau'r uned reoli.

Mae'r addasiad un cydiwr symlaf yn gweithio yn yr un modd â mecaneg glasurol. Fodd bynnag, ar yr un pryd, mae un broblem - nid yw'r electroneg yn cofnodi'r adborth cydiwr. Os yw person yn gallu penderfynu pa mor llyfn y mae angen rhyddhau'r pedal mewn achos penodol, yna mae'r awtomeiddio'n gweithio'n fwy anhyblyg, felly mae symudiadau diriaethol yn cyd-fynd â symudiad y car.
Teimlir hyn yn arbennig mewn addasiadau gyda gyriant trydan o'r actiwadyddion - tra bod y gêr yn newid, bydd y cydiwr mewn cyflwr agored. Bydd hyn yn golygu toriad yn llif y torque, oherwydd bydd y car yn dechrau arafu. Gan fod cyflymder cylchdroi'r olwynion eisoes yn llai cyson â'r gêr ymgysylltiedig, mae plymiad bach yn digwydd.
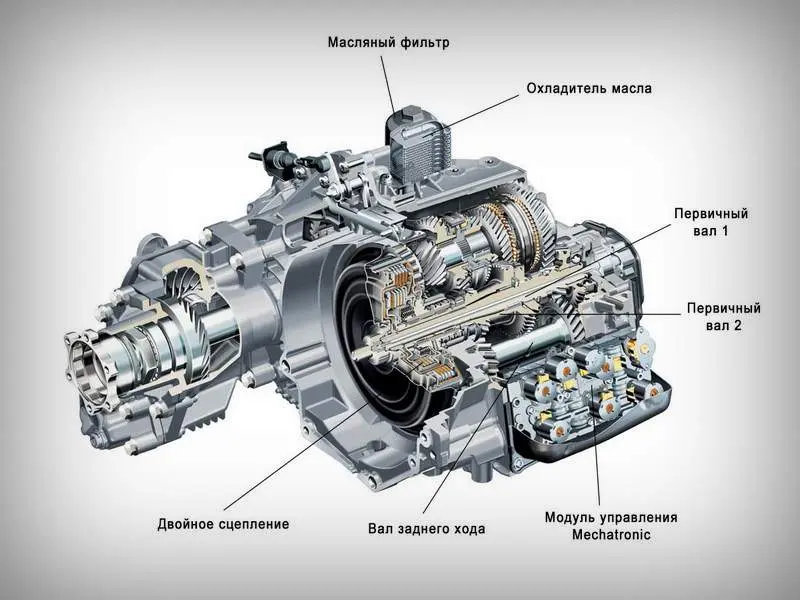
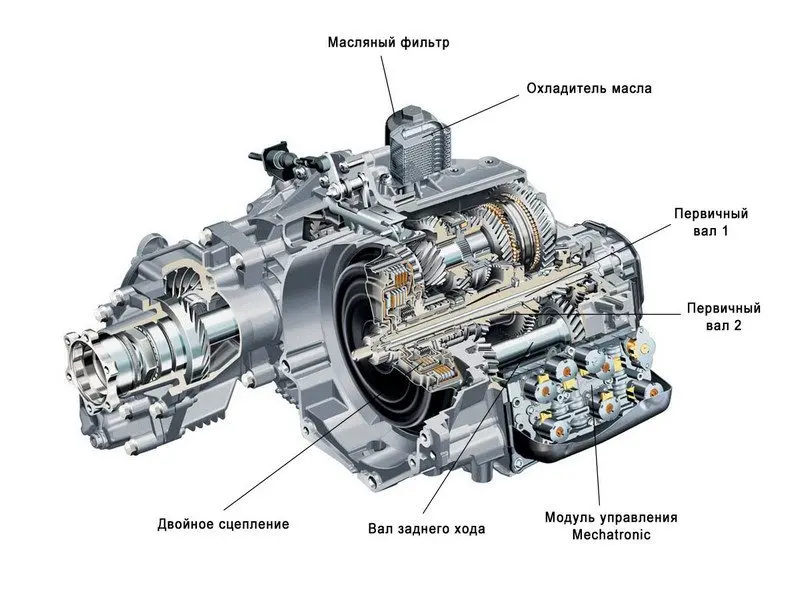
Datrysiad arloesol i'r broblem hon oedd datblygu addasiad cydiwr dwbl. Cynrychiolydd trawiadol o drosglwyddiad o'r fath yw'r Volkswagen DSG. Gadewch i ni edrych yn agosach ar ei nodweddion.
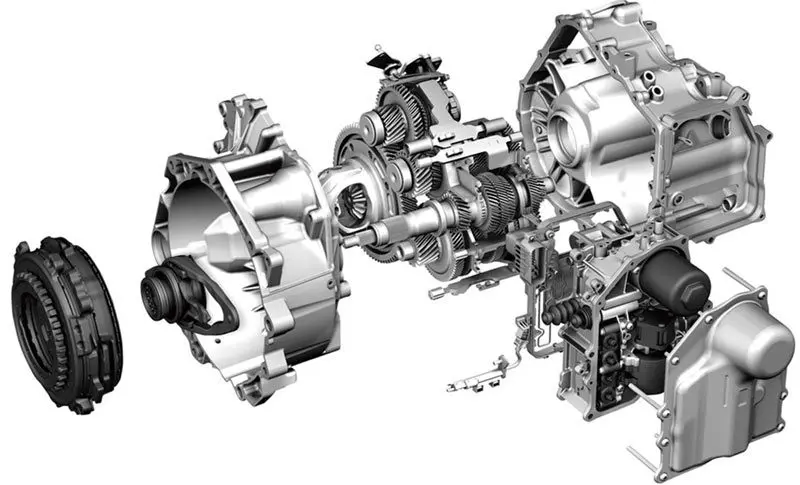
Nodweddion blwch gêr robotig DSG
Mae'r talfyriad yn sefyll am flwch gêr shifft uniongyrchol. Mewn gwirionedd, mae'r rhain yn ddau flwch mecanyddol wedi'u gosod mewn un tŷ, ond gydag un pwynt cysylltu â siasi y peiriant. Mae gan bob mecanwaith ei gydiwr ei hun.
Prif nodwedd yr addasiad hwn yw'r modd dewisol. Hynny yw, tra bod y siafft gyntaf yn rhedeg gyda'r gêr dan sylw, mae'r electroneg eisoes yn cysylltu'r gerau cyfatebol (wrth gyflymu i gynyddu'r gêr, wrth arafu - i is) yr ail siafft. Dim ond un cydiwr sydd ei angen ar y prif actiwadydd a chysylltu un arall. Cyn gynted ag y derbynnir signal o'r uned reoli i newid i gam arall, mae'r cydiwr gweithio yn agor, ac mae'r ail un â gerau sydd eisoes wedi'i rwyllo wedi'i gysylltu ar unwaith.
Mae'r dyluniad hwn yn caniatáu ichi reidio heb brychau cryf wrth gyflymu. Ymddangosodd datblygiad cyntaf addasiad dewisol yn 80au’r ganrif ddiwethaf. Yn wir, yna gosodwyd robotiaid â chydiwr dwbl ar geir rali a rasio, lle mae cyflymder a chywirdeb symud gêr yn bwysig iawn.
Os ydym yn cymharu'r blwch DSG ag awtomatig clasurol, yna mae gan yr opsiwn cyntaf fwy o fanteision. Yn gyntaf, oherwydd strwythur mwy cyfarwydd y prif elfennau (gall y gwneuthurwr gymryd unrhyw analog mecanyddol parod fel sail), bydd blwch o'r fath yn rhatach ar werth. Mae'r un ffactor yn effeithio ar gynnal a chadw'r uned - mae'r mecaneg yn fwy dibynadwy ac yn haws i'w hatgyweirio.
Fe wnaeth hyn alluogi'r gwneuthurwr i osod trosglwyddiad arloesol ar fodelau cyllideb eu cynhyrchion. Yn ail, mae llawer o berchnogion cerbydau sydd â blwch gêr o'r fath yn nodi cynnydd yn economi'r car o'i gymharu â model union yr un fath, ond gyda blwch gêr gwahanol.
Mae peirianwyr pryder VAG wedi datblygu dau amrywiad o'r trosglwyddiad DSG. Mae un ohonynt wedi'i labelu 6, a'r llall yn 7, sy'n cyfateb i nifer y camau yn y blwch. Hefyd, mae awtomatig chwe-chyflym yn defnyddio cydiwr gwlyb, ac mae analog saith-cyflymder yn defnyddio cydiwr sych. Disgrifir yn fanylach am fanteision ac anfanteision y blwch DSG, yn ogystal â sut arall y mae model DSG 6 yn wahanol i'r seithfed addasiad. erthygl ar wahân.
Manteision ac anfanteision
Mae gan y math o drosglwyddiad a ystyrir ochrau cadarnhaol a negyddol. Mae manteision y blwch yn cynnwys:
- Gellir defnyddio trosglwyddiad o'r fath ochr yn ochr ag uned bŵer o bron unrhyw bŵer;
- O'i gymharu â newidydd a pheiriant awtomatig, mae'r fersiwn robotig yn rhatach, er bod hwn yn ddatblygiad eithaf arloesol;
- Mae robotiaid yn fwy dibynadwy na throsglwyddiadau awtomatig eraill;
- Oherwydd y tebygrwydd mewnol â mecaneg, mae'n haws dod o hyd i arbenigwr a fydd yn atgyweirio'r uned;
- Mae symud gêr yn fwy effeithlon yn caniatáu defnyddio pŵer injan heb gynnydd critigol yn y defnydd o danwydd;
- Trwy wella effeithlonrwydd, mae'r peiriant yn allyrru sylweddau llai niweidiol i'r amgylchedd.
Er gwaethaf y manteision amlwg dros drosglwyddiadau awtomatig eraill, mae gan y robot sawl anfantais sylweddol:
- Os oes robot un disg yn y car, yna ni ellir galw'r daith ar gerbyd o'r fath yn gyffyrddus. Wrth newid gerau, bydd pyliau diriaethol, fel petai'r gyrrwr yn taflu'r pedal cydiwr yn sydyn ar y mecaneg.
- Yn fwyaf aml, mae'r cydiwr (ymgysylltiad llai llyfn) a'r actiwadyddion yn methu yn yr uned. Mae hyn yn cymhlethu atgyweirio trosglwyddiadau, gan fod ganddynt adnodd gweithio bach (tua 100 mil cilomedr). Anaml y gellir talu servos ac mae mecanweithiau newydd yn ddrud.
- O ran y cydiwr, mae'r adnodd disg hefyd yn fach iawn - tua 60 mil. Ar ben hynny, tua hanner yr adnodd mae angen cyflawni "cysylltiad" y blwch o dan gyflwr wyneb ffrithiant y rhannau.
- Os ydym yn siarad am addasiad dewisol y DSG, yna profodd i fod yn fwy dibynadwy oherwydd llai o amser ar gyfer newid gerau (diolch i hyn, nid yw'r car yn arafu cymaint). Er gwaethaf hyn, mae'r adlyniad yn dal i ddioddef ynddynt.
O ystyried y ffactorau rhestredig, gallwn ddod i'r casgliad, o ran dibynadwyedd a bywyd gwaith, nad oes gan fecaneg yr un peth. Os rhoddir pwyslais ar y cysur mwyaf, yna mae'n well dewis newidydd (beth yw ei hynodrwydd, darllenwch yma). Dylid cofio na fydd trosglwyddiad o'r fath yn rhoi cyfle i arbed tanwydd.
I gloi, rydym yn cynnig cymhariaeth fideo fer o'r prif fathau o drosglwyddiadau - eu manteision a'u hanfanteision:

Cwestiynau ac atebion:
Beth yw'r gwahaniaeth rhwng automaton a robot? Mae'r trosglwyddiad awtomatig yn gweithio ar draul trawsnewidydd torque (nid oes cyplu anhyblyg â'r olwyn flaen trwy'r cydiwr), ac mae'r robot yn cyfateb i fecaneg, dim ond y cyflymderau sy'n cael eu newid yn awtomatig.
Sut i newid gerau ar flwch robot? Mae'r egwyddor o yrru robot yn union yr un fath â gyrru awtomatig: dewisir y modd a ddymunir ar y dewisydd, a rheolir cyflymder yr injan gan y pedal nwy. Bydd y cyflymderau'n newid ar eu pennau eu hunain.
Faint o bedalau sydd mewn car gyda robot? Er bod y robot yn strwythurol debyg i fecanig, mae'r cydiwr wedi ymddieithrio o'r olwyn flaen yn awtomatig, felly mae gan gar â throsglwyddiad robotig ddau bedal (nwy a brêc).
Sut i barcio car yn iawn gyda blwch robot? Rhaid parcio'r model Ewropeaidd mewn modd A neu mewn gêr gwrthdroi. Os yw'r car yn Americanaidd, yna mae modd P ar y dewisydd.
Un sylw
Dafydd
Helo, dwi angen help, aeth 203 coupes i'r modd brys, beth alla i ei wneud?